Problème dans la formation caché markov modèle et l'utilisation pour la classification
j'ai du mal à comprendre comment utiliser les HMM boîte à outils boîte à outils. Il serait d'une grande aide si quelqu'un qui a une expérience avec elle pourrait clarifier certaines questions conceptuelles. J'ai d'une certaine façon compris la théorie derrière HMM mais c'est déroutant comment la mettre en œuvre et mentionner tous les paramètres.
il y a 2 classes donc nous avons besoin de 2 HMMs.
Disons que les vecteurs d'entraînement sont :classe1 O1={ 4 3 5 1 2} et classe O_2={ 1 4 3 2 4}.
Maintenant, le système doit classer une séquence inconnue O3={1 3 2 4} comme classe 1 ou classe 2.
- Qu'est-ce qui va se passer dans obsmat0 et obsmat1?
- comment spécifier / syntaxe pour la probabilité de transition transmat0 et transmat1?
- quelles seront les données variables dans ce cas?
- est-ce que le nombre D'États Q=5 puisqu'il y a cinq nombres/symboles uniques utilisés?
- nombre de sorties symboles=5 ?
- Comment puis-je mentionner les probabilités de transition transmat0 et transmat1?
2 réponses
au Lieu de répondre à chaque question, permettez-moi d'illustrer comment utiliser le HMM boîte à outils avec un exemple-- exemple de temps qui est habituellement utilisé lors de l'introduction de modèles markov cachés.
Fondamentalement, les états du modèle sont les trois types possibles de la météo: ensoleillé, pluvieux et brumeux. À n'importe quel jour, nous supposons que le temps peut être seulement une de ces valeurs. Ainsi, L'ensemble des États HMM sont:
S = {sunny, rainy, foggy}
Cependant dans cet exemple, nous ne pouvons pas observer la météo directement (apparemment nous sommes enfermés dans le sous-sol!). Au lieu de cela, la seule preuve que nous avons est de savoir si la personne qui vous surveille tous les jours porte un parapluie ou non. En terminologie HMM, ce sont les observations discrètes:
x = {umbrella, no umbrella}
le modèle HMM se caractérise par trois choses:
- Les probabilités antérieures: vecteur des probabilités d'être dans le premier état d'une séquence.
- le prob de transition: matrice décrivant les probabilités de passer d'un État météorologique à un autre.
- le prob d'émission: matrice décrivant les probabilités d'observation d'une sortie (globale ou non) donnée par un État (météo).
ensuite, soit on nous donne ces probabilités, soit on doit les apprendre d'un entraînement. Une fois que c'est fait, nous pouvons faire le raisonnement comme le calcul de la probabilité d'une séquence d'observation par rapport à un modèle HMM (ou un tas de modèles, et de choisir le plus probable)...
1) paramètres connus du modèle
Voici un exemple de code qui montre comment combler les probabilités pour construire le modèle:
Q = 3; %# number of states (sun,rain,fog)
O = 2; %# number of discrete observations (umbrella, no umbrella)
%# prior probabilities
prior = [1 0 0];
%# state transition matrix (1: sun, 2: rain, 3:fog)
A = [0.8 0.05 0.15; 0.2 0.6 0.2; 0.2 0.3 0.5];
%# observation emission matrix (1: umbrella, 2: no umbrella)
B = [0.1 0.9; 0.8 0.2; 0.3 0.7];
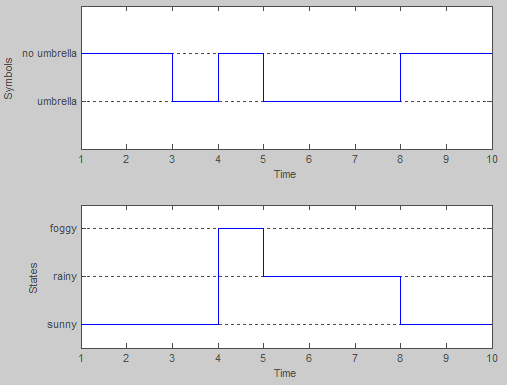
alors nous pouvons échantillonner un tas de séquences de ce modèle:
num = 20; %# 20 sequences
T = 10; %# each of length 10 (days)
[seqs,states] = dhmm_sample(prior, A, B, num, T);
par exemple, la 5ème exemple a:
>> seqs(5,:) %# observation sequence
ans =
2 2 1 2 1 1 1 2 2 2
>> states(5,:) %# hidden states sequence
ans =
1 1 1 3 2 2 2 1 1 1
nous pouvons évaluer la log-vraisemblance de la séquence:
dhmm_logprob(seqs(5,:), prior, A, B)
dhmm_logprob_path(prior, A, B, states(5,:))
ou calculer le chemin de Viterbi (le plus probable état de la séquence):
vPath = viterbi_path(prior, A, multinomial_prob(seqs(5,:),B))
2) paramètres inconnus du modèle
la formation est effectuée à L'aide de L'algorithme EM, et le mieux est de faire avec un set de séquences d'observation.
en continuant sur le même exemple, nous pouvons utiliser les données générées ci-dessus pour former un nouveau modèle et le comparer à l'original:
%# we start with a randomly initialized model
prior_hat = normalise(rand(Q,1));
A_hat = mk_stochastic(rand(Q,Q));
B_hat = mk_stochastic(rand(Q,O));
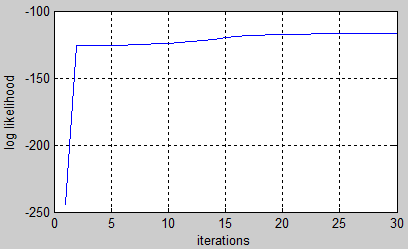
%# learn from data by performing many iterations of EM
[LL,prior_hat,A_hat,B_hat] = dhmm_em(seqs, prior_hat,A_hat,B_hat, 'max_iter',50);
%# plot learning curve
plot(LL), xlabel('iterations'), ylabel('log likelihood'), grid on
gardez à l'esprit que l'ordre des États ne doivent correspondre. C'est pourquoi nous devons permuter les états avant de comparer les deux modèles. Dans cet exemple, le modèle formé ressemble à celui d'origine:
>> p = [2 3 1]; %# states permutation
>> prior, prior_hat(p)
prior =
1 0 0
ans =
0.97401
7.5499e-005
0.02591
>> A, A_hat(p,p)
A =
0.8 0.05 0.15
0.2 0.6 0.2
0.2 0.3 0.5
ans =
0.75967 0.05898 0.18135
0.037482 0.77118 0.19134
0.22003 0.53381 0.24616
>> B, B_hat(p,[1 2])
B =
0.1 0.9
0.8 0.2
0.3 0.7
ans =
0.11237 0.88763
0.72839 0.27161
0.25889 0.74111
il y a plus de choses que vous pouvez faire avec les modèles markov cachés tels que la classification ou la reconnaissance de modèle. Vous auriez différents ensembles de séquences d'obervation appartenant à différentes classes. Vous commencez par former un modèle pour chaque ensemble. Ensuite, avec une nouvelle séquence d'observation, vous pouvez classer il calcule sa vraisemblance par rapport à chaque modèle et prédit le modèle ayant la plus forte probabilité logarithmique.
argmax[ log P(X|model_i) ] over all model_i
Je n'utilise pas la boîte à outils que vous mentionnez, mais j'utilise HTK. Il y a un livre qui décrit très clairement la fonction de HTK, disponible gratuitement
http://htk.eng.cam.ac.uk/docs/docs.shtml
les chapitres d'introduction peuvent vous aider à comprendre.
je peux avoir une tentative rapide de répondre #4 sur votre liste. . . Le nombre d'États émetteurs est lié à la longueur et à la complexité de vos vecteurs caractéristiques. Cependant, il est certainement n'a pas à égaler la longueur du tableau des vecteurs de fonctions, car chaque État émetteur peut avoir une probabilité de transition de revenir en lui-même ou même à un état précédent selon l'architecture. Je ne suis pas sûr non plus si la valeur que vous donnez inclut les états non émetteurs au début et à la fin du hmm, mais ceux-ci doivent être considérés aussi. Choisir le nombre d'États revient souvent à faire des essais et des erreurs.
Bonne chance!