Solveur de programme quadratique (QP) qui ne dépend que de NumPy/SciPy?
Je voudrais que les étudiants résolvent un programme quadratique dans une tâche sans qu'ils aient à installer un logiciel supplémentaire comme cvxopt, etc. Existe-t-il une implémentation Python disponible qui ne dépend que de NumPy/SciPy?
4 réponses
J'ai rencontré une bonne solution et je voulais la sortir. Il existe une implémentation python de LOQO dans la boîte à outils d'apprentissage automatique ELEFANT de NICTA (http://elefant.forge.nicta.com.au à partir de cette publication). Jetez un oeil à l'optimisation.intpointsolver. Cela a été codé par Alex Smola, et j'ai utilisé une version C du même code avec beaucoup de succès.
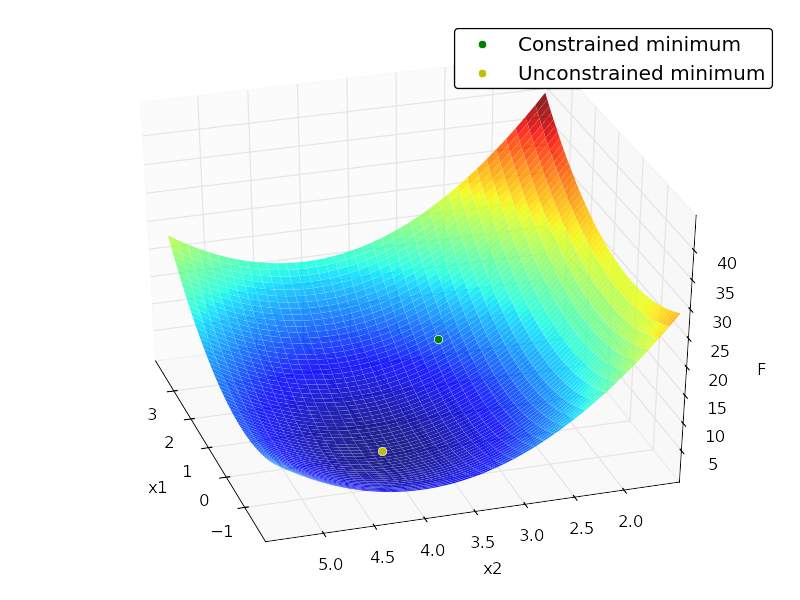
Je ne suis pas très familier avec la programmation quadratique, mais je pense que vous pouvez résoudre ce genre de problème en utilisant simplement les algorithmes de minimisation contraints de scipy.optimize. Voici un exemple:
import numpy as np
from scipy import optimize
from matplotlib import pyplot as plt
from mpl_toolkits.mplot3d.axes3d import Axes3D
# minimize
# F = x[1]^2 + 4x[2]^2 -32x[2] + 64
# subject to:
# x[1] + x[2] <= 7
# -x[1] + 2x[2] <= 4
# x[1] >= 0
# x[2] >= 0
# x[2] <= 4
# in matrix notation:
# F = (1/2)*x.T*H*x + c*x + c0
# subject to:
# Ax <= b
# where:
# H = [[2, 0],
# [0, 8]]
# c = [0, -32]
# c0 = 64
# A = [[ 1, 1],
# [-1, 2],
# [-1, 0],
# [0, -1],
# [0, 1]]
# b = [7,4,0,0,4]
H = np.array([[2., 0.],
[0., 8.]])
c = np.array([0, -32])
c0 = 64
A = np.array([[ 1., 1.],
[-1., 2.],
[-1., 0.],
[0., -1.],
[0., 1.]])
b = np.array([7., 4., 0., 0., 4.])
x0 = np.random.randn(2)
def loss(x, sign=1.):
return sign * (0.5 * np.dot(x.T, np.dot(H, x))+ np.dot(c, x) + c0)
def jac(x, sign=1.):
return sign * (np.dot(x.T, H) + c)
cons = {'type':'ineq',
'fun':lambda x: b - np.dot(A,x),
'jac':lambda x: -A}
opt = {'disp':False}
def solve():
res_cons = optimize.minimize(loss, x0, jac=jac,constraints=cons,
method='SLSQP', options=opt)
res_uncons = optimize.minimize(loss, x0, jac=jac, method='SLSQP',
options=opt)
print '\nConstrained:'
print res_cons
print '\nUnconstrained:'
print res_uncons
x1, x2 = res_cons['x']
f = res_cons['fun']
x1_unc, x2_unc = res_uncons['x']
f_unc = res_uncons['fun']
# plotting
xgrid = np.mgrid[-2:4:0.1, 1.5:5.5:0.1]
xvec = xgrid.reshape(2, -1).T
F = np.vstack([loss(xi) for xi in xvec]).reshape(xgrid.shape[1:])
ax = plt.axes(projection='3d')
ax.hold(True)
ax.plot_surface(xgrid[0], xgrid[1], F, rstride=1, cstride=1,
cmap=plt.cm.jet, shade=True, alpha=0.9, linewidth=0)
ax.plot3D([x1], [x2], [f], 'og', mec='w', label='Constrained minimum')
ax.plot3D([x1_unc], [x2_unc], [f_unc], 'oy', mec='w',
label='Unconstrained minimum')
ax.legend(fancybox=True, numpoints=1)
ax.set_xlabel('x1')
ax.set_ylabel('x2')
ax.set_zlabel('F')
Sortie:
Constrained:
status: 0
success: True
njev: 4
nfev: 4
fun: 7.9999999999997584
x: array([ 2., 3.])
message: 'Optimization terminated successfully.'
jac: array([ 4., -8., 0.])
nit: 4
Unconstrained:
status: 0
success: True
njev: 3
nfev: 5
fun: 0.0
x: array([ -2.66453526e-15, 4.00000000e+00])
message: 'Optimization terminated successfully.'
jac: array([ -5.32907052e-15, -3.55271368e-15, 0.00000000e+00])
nit: 3
Cela peut être une réponse tardive, mais j'ai trouvé CVXOPT - http://cvxopt.org/ - comme couramment utilisés libre bibliothèque python pour Quadratic Programming. Cependant, il n'est pas facile à installer, car il nécessite l'installation d'autres dépendances.
mystic fournit une implémentation Python pure d'algorithmes d'optimisation non linéaires/non convexes avec des fonctionnalités de contraintes avancées qui ne se trouvent généralement que dans les solveurs QP. mystic fournit en fait des contraintes plus robustes que la plupart des solveurs QP. Cependant, si vous recherchez une vitesse algorithmique d'optimisation, ce qui suit n'est pas pour vous. mystic n'est pas lent, mais il s'agit de python pur par opposition aux liaisons python à C. Si vous recherchez des fonctionnalités de flexibilité et de contraintes QP dans un solveur non-linéaire, alors vous pourriez être intéressé.
"""
Maximize: f = 2*x[0]*x[1] + 2*x[0] - x[0]**2 - 2*x[1]**2
Subject to: -2*x[0] + 2*x[1] <= -2
2*x[0] - 4*x[1] <= 0
x[0]**3 -x[1] == 0
where: 0 <= x[0] <= inf
1 <= x[1] <= inf
"""
import numpy as np
import mystic.symbolic as ms
import mystic.solvers as my
import mystic.math as mm
# generate constraints and penalty for a nonlinear system of equations
ieqn = '''
-2*x0 + 2*x1 <= -2
2*x0 - 4*x1 <= 0'''
eqn = '''
x0**3 - x1 == 0'''
cons = ms.generate_constraint(ms.generate_solvers(ms.simplify(eqn,target='x1')))
pens = ms.generate_penalty(ms.generate_conditions(ieqn), k=1e3)
bounds = [(0., None), (1., None)]
# get the objective
def objective(x, sign=1):
x = np.asarray(x)
return sign * (2*x[0]*x[1] + 2*x[0] - x[0]**2 - 2*x[1]**2)
# solve
x0 = np.random.rand(2)
sol = my.fmin_powell(objective, x0, constraint=cons, penalty=pens, disp=True,
bounds=bounds, gtol=3, ftol=1e-6, full_output=True,
args=(-1,))
print 'x* = %s; f(x*) = %s' % (sol[0], -sol[1])
Il convient de noter que {[2] } peut appliquer de manière générique des contraintes D'égalité et d'inégalité LP, QP et d'ordre supérieur à n'importe quel optimiseur donné, pas seulement à un solveur QP spécial. Deuxièmement, {[2] } peut digérer les mathématiques symboliques, donc la facilité de définir/entrer les contraintes est un peu plus agréable que de travailler avec les matrices et les dérivées de fonctions. mystic dépend de numpy, et d'utiliser scipy s'il est installé (toutefois, scipy n'est pas requis). mystic utilise sympy pour gérer les contraintes symboliques, mais ce n'est pas non plus nécessaire pour l'optimisation en général.
Sortie:
Optimization terminated successfully.
Current function value: -2.000000
Iterations: 3
Function evaluations: 103
x* = [ 2. 1.]; f(x*) = 2.0
Obtenez mystic ici: https://github.com/uqfoundation