Traitement d'Image: que sont les occlusions?
Je développe un projet de traitement d'image et je tombe sur le mot occlusion dans de nombreux articles scientifiques, que signifient les occlusions dans le contexte du traitement de l'image? Le dictionnaire ne donne qu'une définition générale. Quelqu'un peut-il les décrire en utilisant une image comme contexte?
4 réponses
L'Occlusion signifie qu'il y a quelque chose que vous voulez voir, mais ne peut pas en raison d'une propriété de la configuration de votre capteur, ou d'un événement. Exactement comment il se manifeste ou comment vous traitez le problème variera en raison du problème à portée de main .
Quelques exemples:
Si vous développez un système qui suit les objets (personnes, voitures, ...) alors l'occlusion se produit si un objet que vous suivez est caché (occlus) par un autre objet. Comme deux personnes qui passent devant l'autre, ou une voiture que les lecteurs sous un pont. Le problème dans ce cas est ce que vous faites quand un objet disparaît et réapparaît à nouveau.
Si vous utilisez une caméra range , l'occlusion est une zone où vous n'avez aucune information. Certaines caméras laser fonctionnent en transmettant un faisceau laser sur la surface que vous examinez, puis en ayant une configuration de caméra qui identifie le point d'impact de ce laser dans l'image résultante. Cela donne les coordonnées 3D de ce point. Cependant, comme la caméra et le laser ne sont pas nécessairement alignés, il peut y avoir des points sur la surface examinée que la caméra peut voir mais que le laser ne peut pas frapper (occlusion). Le problème ici est plus une question de configuration du capteur.
La même chose peut se produire dans l'imagerie stéréo s'il y a des parties de la scène qui ne sont vues que par l'une des deux caméras. Aucune donnée de plage ne peut évidemment être collectée à partir de ces points.
Il y a probablement plus d'exemples.
Si vous spécifiez votre problème, alors peut-être que nous pouvons définir ce qu'est l'occlusion dans ce cas, et quels problèmes cela implique
Le problème de l'occlusion est l'une des principales raisons pour lesquelles la vision par ordinateur est difficile en général. Plus précisément, c'est beaucoup plus problématique dans Suivi d'Objet. Voir les figures ci-dessous:
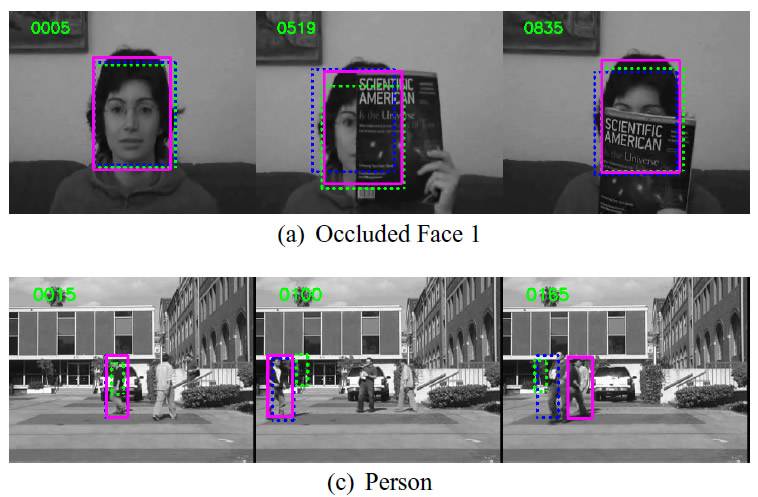
Remarquez, comment le visage de la dame est pas complètement visible dans les cadres 0519 & 0835 par opposition à la face dans le cadre 0005.
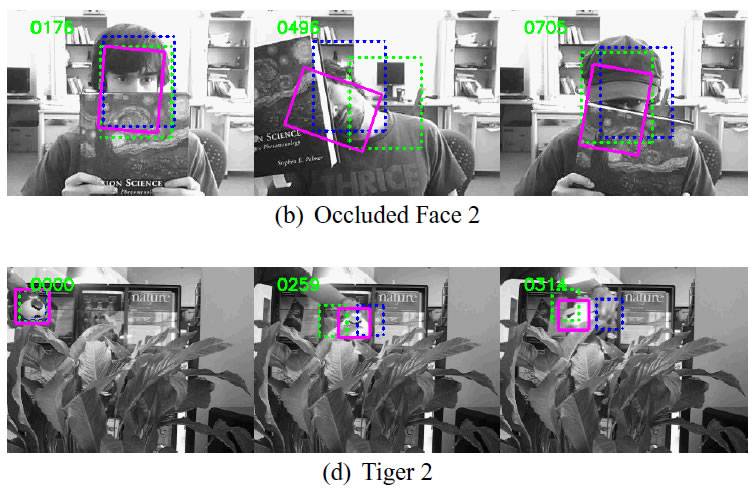
Et voici une autre photo où le visage de l'homme est partiellement caché dans tous les trois cadre.
Remarquez dans l'image ci-dessous comment le suivi du couple dans la boîte englobante rouge et verte est perdu dans le cadre du milieu en raison de l'occlusion (c'est-à-dire partiellement caché par une autre personne devant eux) mais correctement suivi dans la dernière image quand ils deviennent (presque) complètement visible.
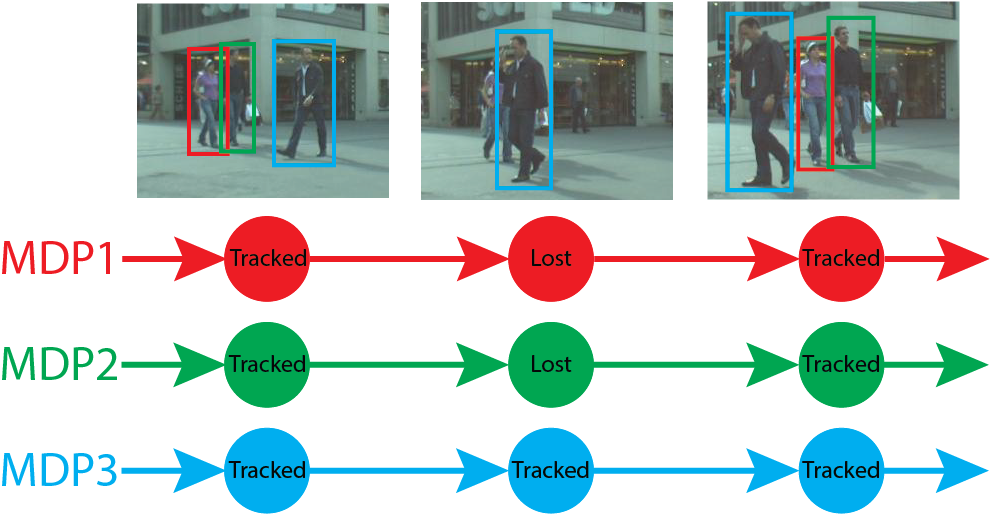
Photo gracieuseté: Stanford, USC
L'Occlusion est celle qui bloque notre vue. Dans l'image montrée ici, nous pouvons facilement voir les gens dans la première rangée. Mais la deuxième rangée est en partie visible et la troisième rangée est beaucoup moins visible. Ici, nous disons que la deuxième ligne est en partie occulté par la première ligne et la troisième ligne est obstruée par des première et deuxième rangées.
Nous pouvons voir de telles occlusions dans les salles de classe (étudiants assis en rangées), les carrefours de circulation (véhicules en attente de signal), les forêts (arbres et plantes), etc. quand il y a beaucoup d'objets.
Comme les autres réponses ont bien expliqué l'occlusion, Je n'ajouterai qu'à cela. Fondamentalement, il y a un écart sémantique entre nous et les ordinateurs.
Ordinateur voit réellement chaque image comme la séquence de valeurs, généralement dans la plage 0-255, pour chaque couleur dans L'Image RVB. Ces valeurs sont indexées sous la forme de (row, col) pour chaque point de l'image. Donc, si les objets changent de position W. R. t la caméra où un aspect de l'objet se cache (permet aux mains d'une personne ne sont pas représentés), l'ordinateur verra des nombres différents (ou des arêtes ou d'autres fonctionnalités), ce qui changera pour que l'algorithme informatique détecte, reconnaisse ou suive l'objet.