Détection de bord sur fond coloré à L'aide D'OpenCV
j'utilise le code suivant pour détecter les contours d'un document donné.
private Mat edgeDetection(Mat src) {
Mat edges = new Mat();
Imgproc.cvtColor(src, edges, Imgproc.COLOR_BGR2GRAY);
Imgproc.GaussianBlur(edges, edges, new Size(5, 5), 0);
Imgproc.Canny(edges, edges, 10, 30);
return edges;
}
et puis je peux trouver le document de ce edges en trouvant le plus grand contour de ceci.
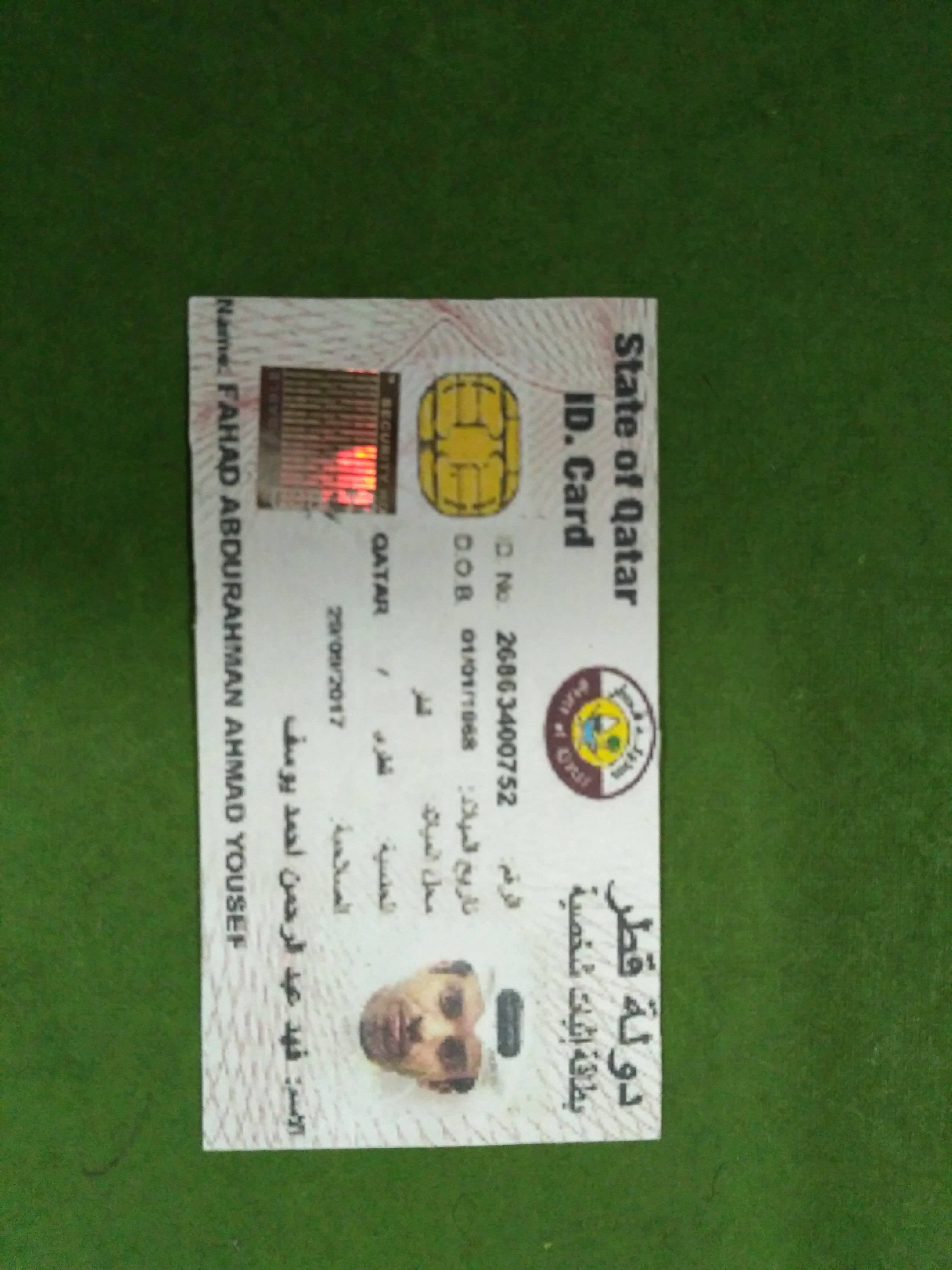
mon problème est que je peux trouver le document du pic suivant:
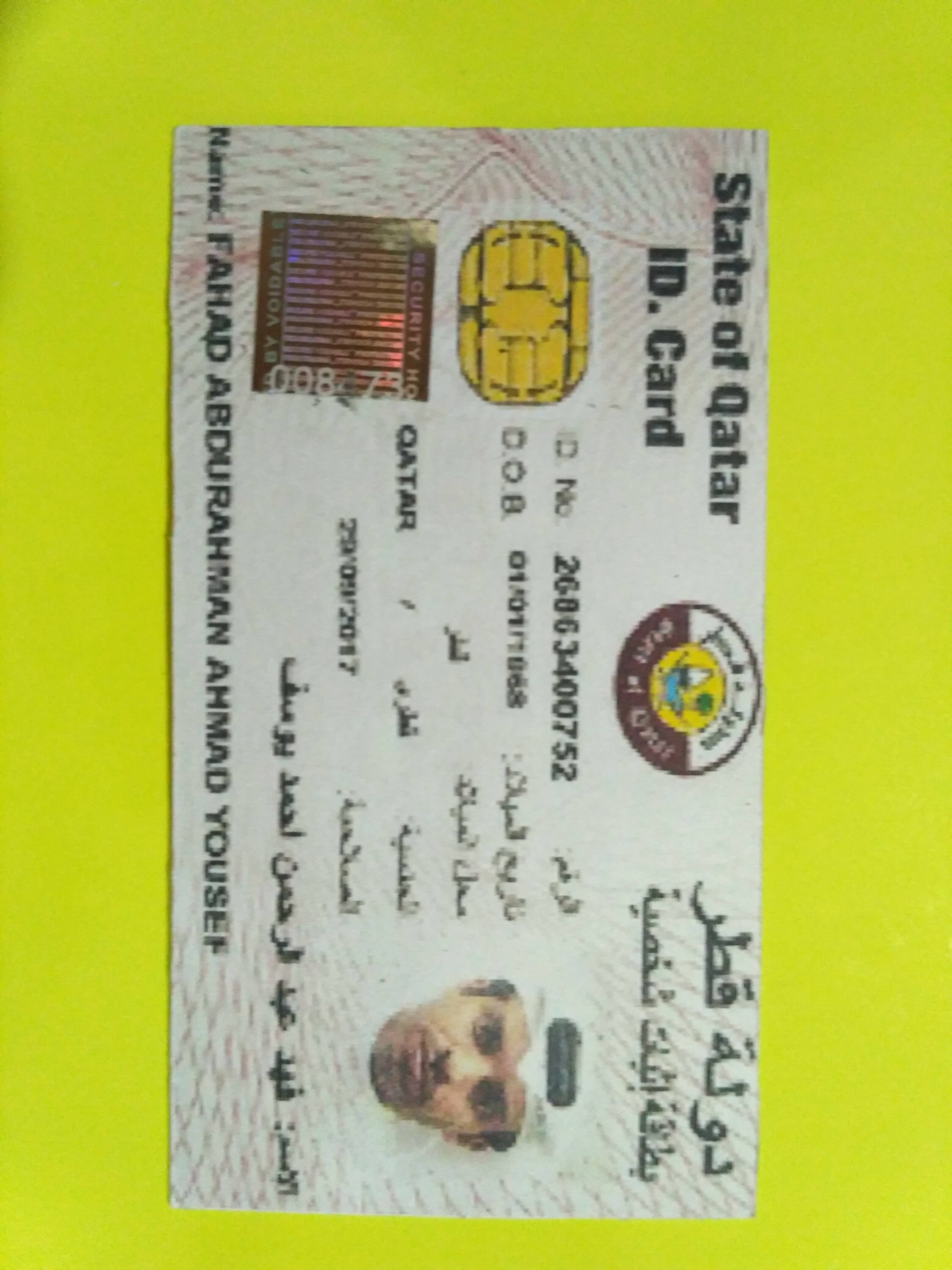
mais pas du pic suivant:
Comment puis-je améliorer cette détection de bord?
2 réponses
j'utilise Python, mais l'idée principale est la même.
si vous faites directement cvtColor: BGR -> gray pour img2, alors vous devez échouer. Parce que le gris devient difficile de distinguer les régions:

réponses:
- Détecter Segment de Couleur dans une image
- détection de contours dans opencv android
- OpenCV C++ / Obj-C: détection d'une feuille de papier / détection carrée
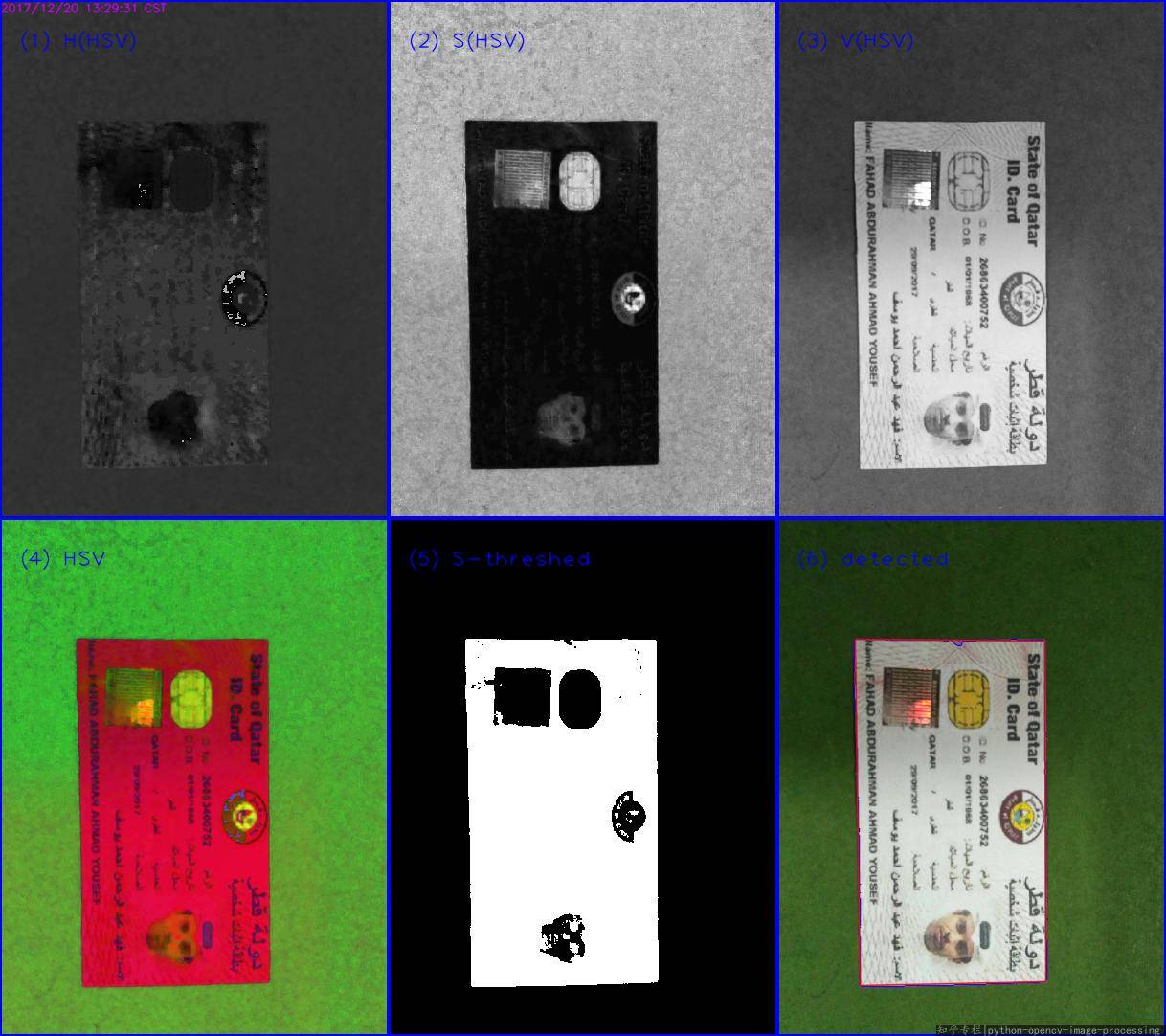
dans votre image , le papier est white , tandis que le fond est colored . Donc, il est préférable de détecter le papier est Saturation(饱和度) canal HSV color space . Pour HSV, se référer à https://en.wikipedia.org/wiki/HSL_and_HSV#Saturation .
étapes Principales:
- Lire
BGR - Convertissez l'image de
bgrenhsvespace - Seuil de la S canal
- puis trouver le contour externe max(ou faire
Canny, ouHoughLinescomme vous voulez, je choisisfindContours), approx pour obtenir coin.
C'est le premier résultat:
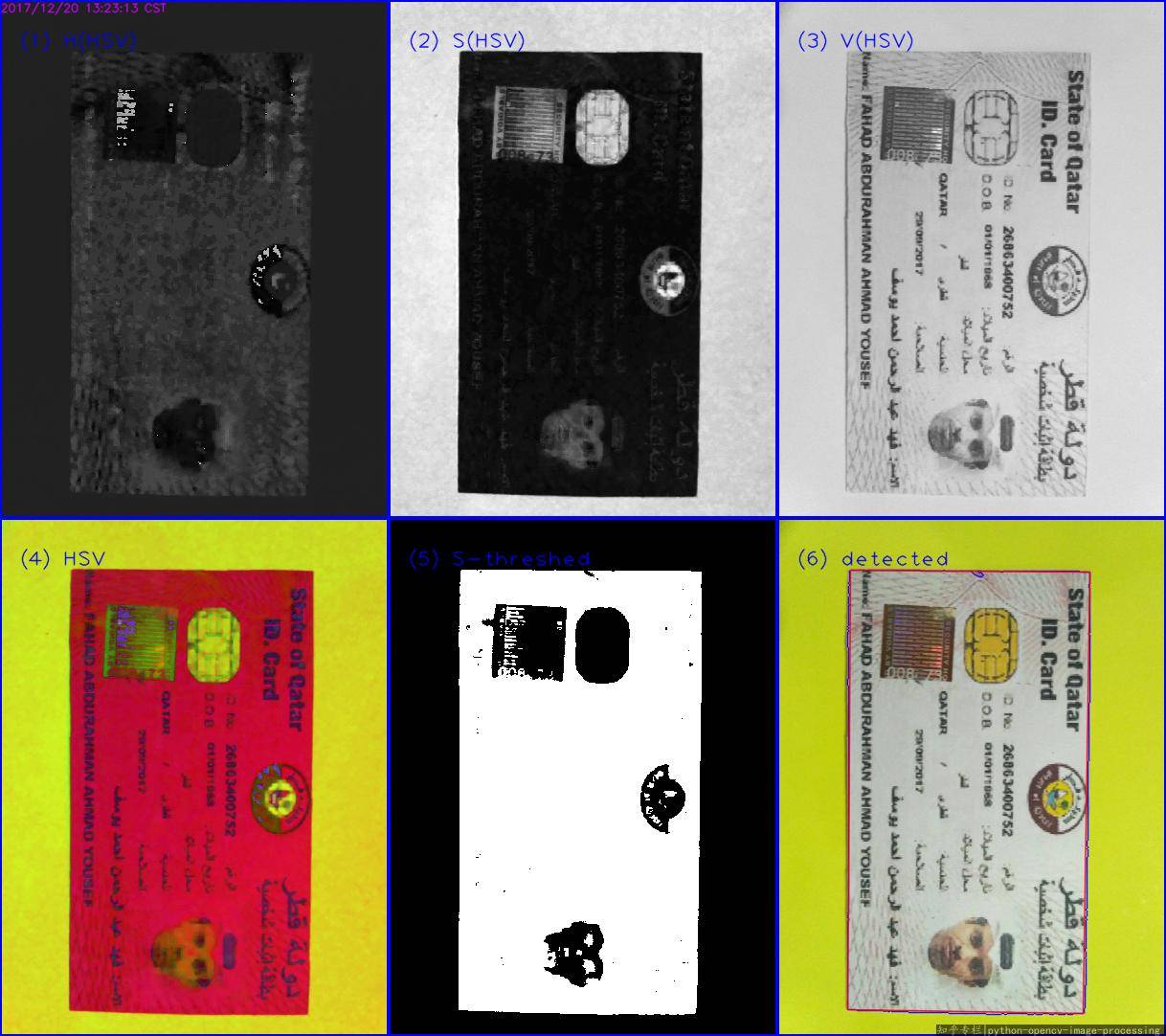
C'est le deuxième résultat:
le code Python (Python 3.5 + OpenCV 3.3):
#!/usr/bin/python3
# 2017.12.20 10:47:28 CST
# 2017.12.20 11:29:30 CST
import cv2
import numpy as np
##(1) read into bgr-space
img = cv2.imread("test2.jpg")
##(2) convert to hsv-space, then split the channels
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
h,s,v = cv2.split(hsv)
##(3) threshold the S channel using adaptive method(`THRESH_OTSU`) or fixed thresh
th, threshed = cv2.threshold(s, 50, 255, cv2.THRESH_BINARY_INV)
##(4) find all the external contours on the threshed S
_, cnts, _ = cv2.findContours(threshed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
canvas = img.copy()
#cv2.drawContours(canvas, cnts, -1, (0,255,0), 1)
## sort and choose the largest contour
cnts = sorted(cnts, key = cv2.contourArea)
cnt = cnts[-1]
## approx the contour, so the get the corner points
arclen = cv2.arcLength(cnt, True)
approx = cv2.approxPolyDP(cnt, 0.02* arclen, True)
cv2.drawContours(canvas, [cnt], -1, (255,0,0), 1, cv2.LINE_AA)
cv2.drawContours(canvas, [approx], -1, (0, 0, 255), 1, cv2.LINE_AA)
## Ok, you can see the result as tag(6)
cv2.imwrite("detected.png", canvas)
dans OpenCV il y a une fonction appelée dilate qui va assombrir les lignes. donc, essayez le code comme ci-dessous.
private Mat edgeDetection(Mat src) {
Mat edges = new Mat();
Imgproc.cvtColor(src, edges, Imgproc.COLOR_BGR2GRAY);
Imgproc.dilate(edges, edges, Imgproc.getStructuringElement(Imgproc.MORPH_RECT, new Size(10, 10)));
Imgproc.GaussianBlur(edges, edges, new Size(5, 5), 0);
Imgproc.Canny(edges, edges, 15, 15 * 3);
return edges;
}