Courbe Catmull-rom sans cusps et sans auto-intersections
j'ai le code suivant pour calculer les points entre les quatre points de contrôle pour générer un catmull-rom de la courbe:
CGPoint interpolatedPosition(CGPoint p0, CGPoint p1, CGPoint p2, CGPoint p3, float t)
{
float t3 = t * t * t;
float t2 = t * t;
float f1 = -0.5 * t3 + t2 - 0.5 * t;
float f2 = 1.5 * t3 - 2.5 * t2 + 1.0;
float f3 = -1.5 * t3 + 2.0 * t2 + 0.5 * t;
float f4 = 0.5 * t3 - 0.5 * t2;
float x = p0.x * f1 + p1.x * f2 + p2.x * f3 + p3.x * f4;
float y = p0.y * f1 + p1.y * f2 + p2.y * f3 + p3.y * f4;
return CGPointMake(x, y);
}
cela fonctionne très bien, mais je veux créer quelque chose que je pense s'appelle la paramétrisation centripète. Cela signifie que la courbe n'aura pas de cuspides et pas d'auto-intersections. Si je déplace un point de contrôle vraiment proche d'un autre, la courbe devrait devenir "plus petite". J'ai Googlé mes yeux en essayant de trouver une façon de le faire. Quelqu'un sait comment faire cette?
4 réponses
j'avais besoin de mettre en oeuvre ceci pour le travail aussi. Le concept fondamental avec lequel vous devez commencer est que la principale différence entre L'implémentation régulière de Catmull-Rom et les versions modifiées est la façon dont ils traitent le temps.
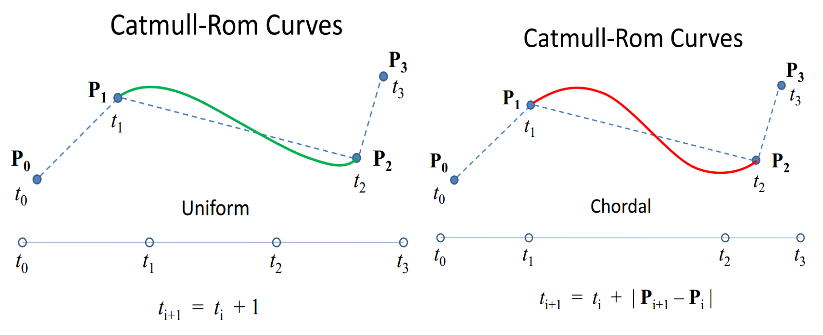
dans la version non paramétrée de votre mise en oeuvre originale, t commence à 0 et se termine à 1 et calcule la courbe de P1 à P2. Dans l'implémentation de temps paramétrée, t commence avec 0 à P0, et continue d'augmenter sur les quatre points. Donc dans le cas uniforme, il serait 1 à P1 et 2 à P2, et vous passeriez dans des valeurs allant de 1 à 2 pour votre interpolation.
Les cordages cas montre |Pi+1 - P| le laps de temps pendant le changement. Cela signifie simplement que vous pouvez utiliser la distance en ligne droite entre les points de chaque segment pour calculer la longueur réelle à utiliser. Le cas centripète utilise juste une méthode légèrement différente pour calculer la durée optimale d'utilisation pour chaque segment.
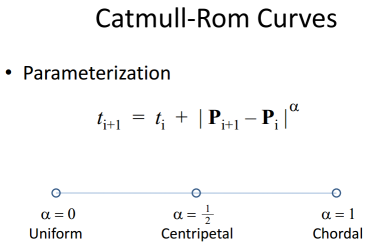
donc maintenant nous avons juste besoin de savoir comment trouver des équations qui nous permettront de brancher nos nouvelles valeurs temporelles. L'équation Catmull-Rom typique n'a qu'un t en elle, le temps que vous essayez de calculer une valeur pour. J'ai trouvé le meilleur article pour décrire la façon dont ces paramètres sont calculés ici: http://www.cemyuksel.com/research/catmullrom_param/catmullrom.pdf. Ils ont mis l'accent sur une mathématique de l'évaluation de la courbes, mais en elle se trouve la formule cruciale de Barry et Goldman.(1)
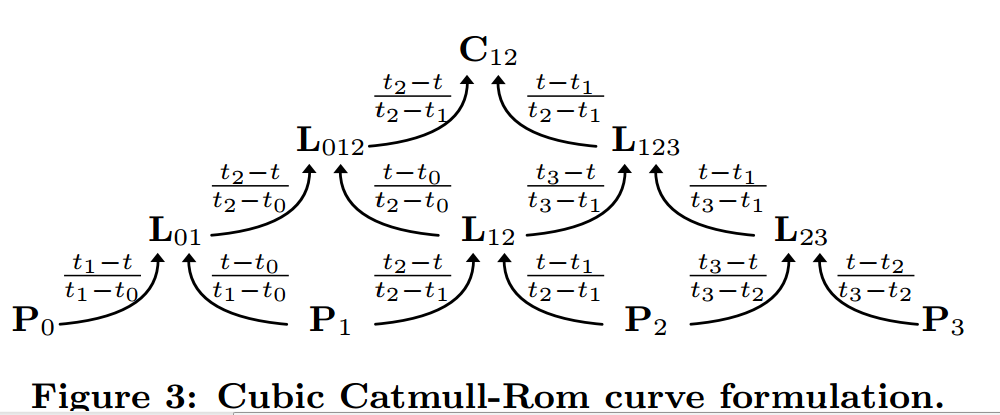
dans le diagramme ci-dessus, les flèches signifient "multiplié par" le rapport indiqué dans la flèche.
ensuite, Cela nous donne ce dont nous avons besoin pour effectuer un calcul pour obtenir le résultat souhaité. X et Y sont calculés indépendamment, bien que j'ai utilisé le facteur "Distance" pour modifier le temps en fonction de la distance 2D, et non de la distance 1D.
Test résultats:
(1) P. J. Barry et R. N. Goldman. Une évaluation récursive de l'algorithme pour une classe de catmull-rom splines. SIGGRAPH Infographie, 22(4):199{204, 1988.
le code source de mon implémentation finale en Java est le suivant:
/**
* This method will calculate the Catmull-Rom interpolation curve, returning
* it as a list of Coord coordinate objects. This method in particular
* adds the first and last control points which are not visible, but required
* for calculating the spline.
*
* @param coordinates The list of original straight line points to calculate
* an interpolation from.
* @param pointsPerSegment The integer number of equally spaced points to
* return along each curve. The actual distance between each
* point will depend on the spacing between the control points.
* @return The list of interpolated coordinates.
* @param curveType Chordal (stiff), Uniform(floppy), or Centripetal(medium)
* @throws gov.ca.water.shapelite.analysis.CatmullRomException if
* pointsPerSegment is less than 2.
*/
public static List<Coord> interpolate(List<Coord> coordinates, int pointsPerSegment, CatmullRomType curveType)
throws CatmullRomException {
List<Coord> vertices = new ArrayList<>();
for (Coord c : coordinates) {
vertices.add(c.copy());
}
if (pointsPerSegment < 2) {
throw new CatmullRomException("The pointsPerSegment parameter must be greater than 2, since 2 points is just the linear segment.");
}
// Cannot interpolate curves given only two points. Two points
// is best represented as a simple line segment.
if (vertices.size() < 3) {
return vertices;
}
// Test whether the shape is open or closed by checking to see if
// the first point intersects with the last point. M and Z are ignored.
boolean isClosed = vertices.get(0).intersects2D(vertices.get(vertices.size() - 1));
if (isClosed) {
// Use the second and second from last points as control points.
// get the second point.
Coord p2 = vertices.get(1).copy();
// get the point before the last point
Coord pn1 = vertices.get(vertices.size() - 2).copy();
// insert the second from the last point as the first point in the list
// because when the shape is closed it keeps wrapping around to
// the second point.
vertices.add(0, pn1);
// add the second point to the end.
vertices.add(p2);
} else {
// The shape is open, so use control points that simply extend
// the first and last segments
// Get the change in x and y between the first and second coordinates.
double dx = vertices.get(1).X - vertices.get(0).X;
double dy = vertices.get(1).Y - vertices.get(0).Y;
// Then using the change, extrapolate backwards to find a control point.
double x1 = vertices.get(0).X - dx;
double y1 = vertices.get(0).Y - dy;
// Actaully create the start point from the extrapolated values.
Coord start = new Coord(x1, y1, vertices.get(0).Z);
// Repeat for the end control point.
int n = vertices.size() - 1;
dx = vertices.get(n).X - vertices.get(n - 1).X;
dy = vertices.get(n).Y - vertices.get(n - 1).Y;
double xn = vertices.get(n).X + dx;
double yn = vertices.get(n).Y + dy;
Coord end = new Coord(xn, yn, vertices.get(n).Z);
// insert the start control point at the start of the vertices list.
vertices.add(0, start);
// append the end control ponit to the end of the vertices list.
vertices.add(end);
}
// Dimension a result list of coordinates.
List<Coord> result = new ArrayList<>();
// When looping, remember that each cycle requires 4 points, starting
// with i and ending with i+3. So we don't loop through all the points.
for (int i = 0; i < vertices.size() - 3; i++) {
// Actually calculate the Catmull-Rom curve for one segment.
List<Coord> points = interpolate(vertices, i, pointsPerSegment, curveType);
// Since the middle points are added twice, once for each bordering
// segment, we only add the 0 index result point for the first
// segment. Otherwise we will have duplicate points.
if (result.size() > 0) {
points.remove(0);
}
// Add the coordinates for the segment to the result list.
result.addAll(points);
}
return result;
}
/**
* Given a list of control points, this will create a list of pointsPerSegment
* points spaced uniformly along the resulting Catmull-Rom curve.
*
* @param points The list of control points, leading and ending with a
* coordinate that is only used for controling the spline and is not visualized.
* @param index The index of control point p0, where p0, p1, p2, and p3 are
* used in order to create a curve between p1 and p2.
* @param pointsPerSegment The total number of uniformly spaced interpolated
* points to calculate for each segment. The larger this number, the
* smoother the resulting curve.
* @param curveType Clarifies whether the curve should use uniform, chordal
* or centripetal curve types. Uniform can produce loops, chordal can
* produce large distortions from the original lines, and centripetal is an
* optimal balance without spaces.
* @return the list of coordinates that define the CatmullRom curve
* between the points defined by index+1 and index+2.
*/
public static List<Coord> interpolate(List<Coord> points, int index, int pointsPerSegment, CatmullRomType curveType) {
List<Coord> result = new ArrayList<>();
double[] x = new double[4];
double[] y = new double[4];
double[] time = new double[4];
for (int i = 0; i < 4; i++) {
x[i] = points.get(index + i).X;
y[i] = points.get(index + i).Y;
time[i] = i;
}
double tstart = 1;
double tend = 2;
if (!curveType.equals(CatmullRomType.Uniform)) {
double total = 0;
for (int i = 1; i < 4; i++) {
double dx = x[i] - x[i - 1];
double dy = y[i] - y[i - 1];
if (curveType.equals(CatmullRomType.Centripetal)) {
total += Math.pow(dx * dx + dy * dy, .25);
} else {
total += Math.pow(dx * dx + dy * dy, .5);
}
time[i] = total;
}
tstart = time[1];
tend = time[2];
}
double z1 = 0.0;
double z2 = 0.0;
if (!Double.isNaN(points.get(index + 1).Z)) {
z1 = points.get(index + 1).Z;
}
if (!Double.isNaN(points.get(index + 2).Z)) {
z2 = points.get(index + 2).Z;
}
double dz = z2 - z1;
int segments = pointsPerSegment - 1;
result.add(points.get(index + 1));
for (int i = 1; i < segments; i++) {
double xi = interpolate(x, time, tstart + (i * (tend - tstart)) / segments);
double yi = interpolate(y, time, tstart + (i * (tend - tstart)) / segments);
double zi = z1 + (dz * i) / segments;
result.add(new Coord(xi, yi, zi));
}
result.add(points.get(index + 2));
return result;
}
/**
* Unlike the other implementation here, which uses the default "uniform"
* treatment of t, this computation is used to calculate the same values but
* introduces the ability to "parameterize" the t values used in the
* calculation. This is based on Figure 3 from
* http://www.cemyuksel.com/research/catmullrom_param/catmullrom.pdf
*
* @param p An array of double values of length 4, where interpolation
* occurs from p1 to p2.
* @param time An array of time measures of length 4, corresponding to each
* p value.
* @param t the actual interpolation ratio from 0 to 1 representing the
* position between p1 and p2 to interpolate the value.
* @return
*/
public static double interpolate(double[] p, double[] time, double t) {
double L01 = p[0] * (time[1] - t) / (time[1] - time[0]) + p[1] * (t - time[0]) / (time[1] - time[0]);
double L12 = p[1] * (time[2] - t) / (time[2] - time[1]) + p[2] * (t - time[1]) / (time[2] - time[1]);
double L23 = p[2] * (time[3] - t) / (time[3] - time[2]) + p[3] * (t - time[2]) / (time[3] - time[2]);
double L012 = L01 * (time[2] - t) / (time[2] - time[0]) + L12 * (t - time[0]) / (time[2] - time[0]);
double L123 = L12 * (time[3] - t) / (time[3] - time[1]) + L23 * (t - time[1]) / (time[3] - time[1]);
double C12 = L012 * (time[2] - t) / (time[2] - time[1]) + L123 * (t - time[1]) / (time[2] - time[1]);
return C12;
}
il y a une façon beaucoup plus simple et efficace de mettre en œuvre ce qui ne nécessite que vous pour calculer vos tangentes en utilisant une formule différente, sans avoir à mettre en œuvre l'algorithme d'évaluation récursive de Barry et Goldman.
si vous prenez la paramétrisation Barry-Goldman (référencée dans la réponse de Ted) C( t) pour les noeuds (t0, t1, t2, t3) et les points de contrôle( P0,P1, P2, P3), sa forme fermée est assez compliquée, mais à la fin c'est toujours un polynôme cubique en t quand vous limitez-le à l'intervalle (t1,t2). Tout ce qu'il nous faut donc pour le décrire pleinement, ce sont les valeurs et les tangentes aux deux extrémités t1 et t2. Si nous calculons ces valeurs (Je l'ai fait dans Mathematica), nous trouvons
C(t1) = P1
C(t2) = P2
C'(t1) = (P1 - P0) / (t1 - t0) - (P2 - P0) / (t2 - t0) + (P2 - P1) / (t2 - t1)
C'(t2) = (P2 - P1) / (t2 - t1) - (P3 - P1) / (t3 - t1) + (P3 - P2) / (t3 - t2)
nous pouvons simplement brancher ceci dans le formule standard pour le calcul d'une spline cubique avec des valeurs données et tangentes aux extrémités et nous avons notre spline Catmull-Rom non uniforme. Une mise en garde est que les tangentes ci-dessus sont calculées pour l'intervalle (t1,t2), donc si vous voulez évaluer la courbe dans l'intervalle standard (0,1), il suffit de redimensionner les tangentes en les multipliant par le facteur (t2-t1).
j'ai mis un exemple C++ sur Ideone: http://ideone.com/NoEbVM
je vais aussi coller le code ci-dessous.
#include <iostream>
#include <cmath>
using namespace std;
struct CubicPoly
{
float c0, c1, c2, c3;
float eval(float t)
{
float t2 = t*t;
float t3 = t2 * t;
return c0 + c1*t + c2*t2 + c3*t3;
}
};
/*
* Compute coefficients for a cubic polynomial
* p(s) = c0 + c1*s + c2*s^2 + c3*s^3
* such that
* p(0) = x0, p(1) = x1
* and
* p'(0) = t0, p'(1) = t1.
*/
void InitCubicPoly(float x0, float x1, float t0, float t1, CubicPoly &p)
{
p.c0 = x0;
p.c1 = t0;
p.c2 = -3*x0 + 3*x1 - 2*t0 - t1;
p.c3 = 2*x0 - 2*x1 + t0 + t1;
}
// standard Catmull-Rom spline: interpolate between x1 and x2 with previous/following points x0/x3
// (we don't need this here, but it's for illustration)
void InitCatmullRom(float x0, float x1, float x2, float x3, CubicPoly &p)
{
// Catmull-Rom with tension 0.5
InitCubicPoly(x1, x2, 0.5f*(x2-x0), 0.5f*(x3-x1), p);
}
// compute coefficients for a nonuniform Catmull-Rom spline
void InitNonuniformCatmullRom(float x0, float x1, float x2, float x3, float dt0, float dt1, float dt2, CubicPoly &p)
{
// compute tangents when parameterized in [t1,t2]
float t1 = (x1 - x0) / dt0 - (x2 - x0) / (dt0 + dt1) + (x2 - x1) / dt1;
float t2 = (x2 - x1) / dt1 - (x3 - x1) / (dt1 + dt2) + (x3 - x2) / dt2;
// rescale tangents for parametrization in [0,1]
t1 *= dt1;
t2 *= dt1;
InitCubicPoly(x1, x2, t1, t2, p);
}
struct Vec2D
{
Vec2D(float _x, float _y) : x(_x), y(_y) {}
float x, y;
};
float VecDistSquared(const Vec2D& p, const Vec2D& q)
{
float dx = q.x - p.x;
float dy = q.y - p.y;
return dx*dx + dy*dy;
}
void InitCentripetalCR(const Vec2D& p0, const Vec2D& p1, const Vec2D& p2, const Vec2D& p3,
CubicPoly &px, CubicPoly &py)
{
float dt0 = powf(VecDistSquared(p0, p1), 0.25f);
float dt1 = powf(VecDistSquared(p1, p2), 0.25f);
float dt2 = powf(VecDistSquared(p2, p3), 0.25f);
// safety check for repeated points
if (dt1 < 1e-4f) dt1 = 1.0f;
if (dt0 < 1e-4f) dt0 = dt1;
if (dt2 < 1e-4f) dt2 = dt1;
InitNonuniformCatmullRom(p0.x, p1.x, p2.x, p3.x, dt0, dt1, dt2, px);
InitNonuniformCatmullRom(p0.y, p1.y, p2.y, p3.y, dt0, dt1, dt2, py);
}
int main()
{
Vec2D p0(0,0), p1(1,1), p2(1.1,1), p3(2,0);
CubicPoly px, py;
InitCentripetalCR(p0, p1, p2, p3, px, py);
for (int i = 0; i <= 10; ++i)
cout << px.eval(0.1f*i) << " " << py.eval(0.1f*i) << endl;
}
Voici une version iOS du code de Ted. J'ai exclu les parties en "z".
.h
typedef enum {
CatmullRomTypeUniform,
CatmullRomTypeChordal,
CatmullRomTypeCentripetal
} CatmullRomType ;
.m
-(NSMutableArray *)interpolate:(NSArray *)coordinates withPointsPerSegment:(NSInteger)pointsPerSegment andType:(CatmullRomType)curveType {
NSMutableArray *vertices = [[NSMutableArray alloc] initWithArray:coordinates copyItems:YES];
if (pointsPerSegment < 3)
return vertices;
//start point
CGPoint pt1 = [vertices[0] CGPointValue];
CGPoint pt2 = [vertices[1] CGPointValue];
double dx = pt2.x - pt1.x;
double dy = pt2.y - pt1.y;
double x1 = pt1.x - dx;
double y1 = pt1.y - dy;
CGPoint start = CGPointMake(x1*.5, y1);
//end point
pt2 = [vertices[vertices.count-1] CGPointValue];
pt1 = [vertices[vertices.count-2] CGPointValue];
dx = pt2.x - pt1.x;
dy = pt2.y - pt1.y;
x1 = pt2.x + dx;
y1 = pt2.y + dy;
CGPoint end = CGPointMake(x1, y1);
[vertices insertObject:[NSValue valueWithCGPoint:start] atIndex:0];
[vertices addObject:[NSValue valueWithCGPoint:end]];
NSMutableArray *result = [[NSMutableArray alloc] init];
for (int i = 0; i < vertices.count - 3; i++) {
NSMutableArray *points = [self interpolate:vertices forIndex:i withPointsPerSegment:pointsPerSegment andType:curveType];
if ([points count] > 0)
[points removeObjectAtIndex:0];
[result addObjectsFromArray:points];
}
return result;
}
-(double)interpolate:(double*)p time:(double*)time t:(double) t {
double L01 = p[0] * (time[1] - t) / (time[1] - time[0]) + p[1] * (t - time[0]) / (time[1] - time[0]);
double L12 = p[1] * (time[2] - t) / (time[2] - time[1]) + p[2] * (t - time[1]) / (time[2] - time[1]);
double L23 = p[2] * (time[3] - t) / (time[3] - time[2]) + p[3] * (t - time[2]) / (time[3] - time[2]);
double L012 = L01 * (time[2] - t) / (time[2] - time[0]) + L12 * (t - time[0]) / (time[2] - time[0]);
double L123 = L12 * (time[3] - t) / (time[3] - time[1]) + L23 * (t - time[1]) / (time[3] - time[1]);
double C12 = L012 * (time[2] - t) / (time[2] - time[1]) + L123 * (t - time[1]) / (time[2] - time[1]);
return C12;
}
-(NSMutableArray*)interpolate:(NSArray *)points forIndex:(NSInteger)index withPointsPerSegment:(NSInteger)pointsPerSegment andType:(CatmullRomType)curveType {
NSMutableArray *result = [[NSMutableArray alloc] init];
double x[4];
double y[4];
double time[4];
for (int i=0; i < 4; i++) {
x[i] = [points[index+i] CGPointValue].x;
y[i] = [points[index+i] CGPointValue].y;
time[i] = i;
}
double tstart = 1;
double tend = 2;
if (curveType != CatmullRomTypeUniform) {
double total = 0;
for (int i=1; i < 4; i++) {
double dx = x[i] - x[i-1];
double dy = y[i] - y[i-1];
if (curveType == CatmullRomTypeCentripetal) {
total += pow(dx * dx + dy * dy, 0.25);
}
else {
total += pow(dx * dx + dy * dy, 0.5); //sqrt
}
time[i] = total;
}
tstart = time[1];
tend = time[2];
}
int segments = pointsPerSegment - 1;
[result addObject:points[index+1]];
for (int i =1; i < segments; i++) {
double xi = [self interpolate:x time:time t:tstart + (i * (tend - tstart)) / segments];
double yi = [self interpolate:y time:time t:tstart + (i * (tend - tstart)) / segments];
NSLog(@"(%f,%f)",xi,yi);
[result addObject:[NSValue valueWithCGPoint:CGPointMake(xi, yi)]];
}
[result addObject:points[index+2]];
return result;
}
aussi, Voici une méthode pour transformer un tableau de points en un chemin plus Bézier pour le dessin, en utilisant le
-(UIBezierPath*)bezierPathFromPoints:(NSArray *)points withGranulaity:(NSInteger)granularity
{
UIBezierPath __block *path = [[UIBezierPath alloc] init];
NSMutableArray *curve = [self interpolate:points withPointsPerSegment:granularity andType:CatmullRomTypeCentripetal];
CGPoint __block p0 = [curve[0] CGPointValue];
[path moveToPoint:p0];
//use this loop to draw lines between all points
for (int idx=1; idx < [curve count]; idx+=1) {
CGPoint c1 = [curve[idx] CGPointValue];
[path addLineToPoint:c1];
};
//or use this loop to use actual control points (less smooth but probably faster)
// for (int idx=0; idx < [curve count]-3; idx+=3) {
// CGPoint c1 = [curve[idx+1] CGPointValue];
// CGPoint c2 = [curve[idx+2] CGPointValue];
// CGPoint p1 = [curve[idx+3] CGPointValue];
//
// [path addCurveToPoint:p1 controlPoint1:c1 controlPoint2:c2];
// };
return path;
}
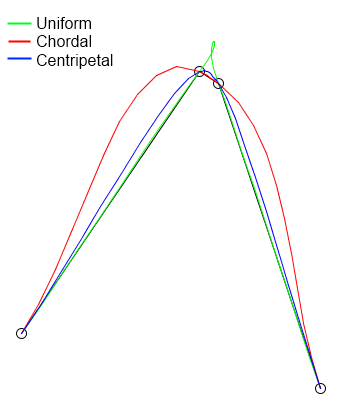
j'ai codé quelque chose en Python (adaptation de la page de Wikipedia Catmull-Rom) qui compare les lignes uniformes, centripèdes, et chorales (bien que vous pouvez définir alpha à tout ce que vous voulez) en utilisant des données aléatoires (vous pouvez utiliser vos propres données et les fucntions fonctionnent bien). À noter que pour les points de terminaison j'ai juste coincé dans un rapide "hack" qui maintient la pente de la première et de la dernière 2 points, bien que la distance entre ce point et le premier/perdu point connu est arbitraire (je l'ai mis à 1% de la domaine... pour aucune raison du tout. Alors gardez cela à l'esprit avant de vous appliquer à quelque chose d'important):
# coding: utf-8
# In[1]:
import numpy
import matplotlib.pyplot as plt
get_ipython().magic(u'pylab inline')
# In[2]:
def CatmullRomSpline(P0, P1, P2, P3, a, nPoints=100):
"""
P0, P1, P2, and P3 should be (x,y) point pairs that define the Catmull-Rom spline.
nPoints is the number of points to include in this curve segment.
"""
# Convert the points to numpy so that we can do array multiplication
P0, P1, P2, P3 = map(numpy.array, [P0, P1, P2, P3])
# Calculate t0 to t4
alpha = a
def tj(ti, Pi, Pj):
xi, yi = Pi
xj, yj = Pj
return ( ( (xj-xi)**2 + (yj-yi)**2 )**0.5 )**alpha + ti
t0 = 0
t1 = tj(t0, P0, P1)
t2 = tj(t1, P1, P2)
t3 = tj(t2, P2, P3)
# Only calculate points between P1 and P2
t = numpy.linspace(t1,t2,nPoints)
# Reshape so that we can multiply by the points P0 to P3
# and get a point for each value of t.
t = t.reshape(len(t),1)
A1 = (t1-t)/(t1-t0)*P0 + (t-t0)/(t1-t0)*P1
A2 = (t2-t)/(t2-t1)*P1 + (t-t1)/(t2-t1)*P2
A3 = (t3-t)/(t3-t2)*P2 + (t-t2)/(t3-t2)*P3
B1 = (t2-t)/(t2-t0)*A1 + (t-t0)/(t2-t0)*A2
B2 = (t3-t)/(t3-t1)*A2 + (t-t1)/(t3-t1)*A3
C = (t2-t)/(t2-t1)*B1 + (t-t1)/(t2-t1)*B2
return C
def CatmullRomChain(P,alpha):
"""
Calculate Catmull Rom for a chain of points and return the combined curve.
"""
sz = len(P)
# The curve C will contain an array of (x,y) points.
C = []
for i in range(sz-3):
c = CatmullRomSpline(P[i], P[i+1], P[i+2], P[i+3],alpha)
C.extend(c)
return C
# In[8]:
# Define a set of points for curve to go through
Points = numpy.random.rand(12,2)
x1=Points[0][0]
x2=Points[1][0]
y1=Points[0][1]
y2=Points[1][1]
x3=Points[-2][0]
x4=Points[-1][0]
y3=Points[-2][1]
y4=Points[-1][1]
dom=max(Points[:,0])-min(Points[:,0])
rng=max(Points[:,1])-min(Points[:,1])
prex=x1+sign(x1-x2)*dom*0.01
prey=(y1-y2)/(x1-x2)*dom*0.01+y1
endx=x4+sign(x4-x3)*dom*0.01
endy=(y4-y3)/(x4-x3)*dom*0.01+y4
print len(Points)
Points=list(Points)
Points.insert(0,array([prex,prey]))
Points.append(array([endx,endy]))
print len(Points)
# In[9]:
#Define alpha
a=0.
# Calculate the Catmull-Rom splines through the points
c = CatmullRomChain(Points,a)
# Convert the Catmull-Rom curve points into x and y arrays and plot
x,y = zip(*c)
plt.plot(x,y,c='green',zorder=10)
# Plot the control points
px, py = zip(*Points)
plt.plot(px,py,'or')
a=0.5
c = CatmullRomChain(Points,a)
x,y = zip(*c)
plt.plot(x,y,c='blue')
a=1.
c = CatmullRomChain(Points,a)
x,y = zip(*c)
plt.plot(x,y,c='red')
plt.grid(b=True)
plt.show()
# In[10]:
Points
# In[ ]:
code original:https://en.wikipedia.org/wiki/Centripetal_Catmull%E2%80%93Rom_spline